高速道路での自動走行車のロードマップ
»
IT総合戦略本部は2016年2月17日、 新戦略推進専門調査会分科会 の「第12回道路交通分科会」を開催し、「官民ITS構想・ロードマップ2015」見直しに向けた論点:「①市場化に向けたロードマップの精緻化」について、検討を進めています。
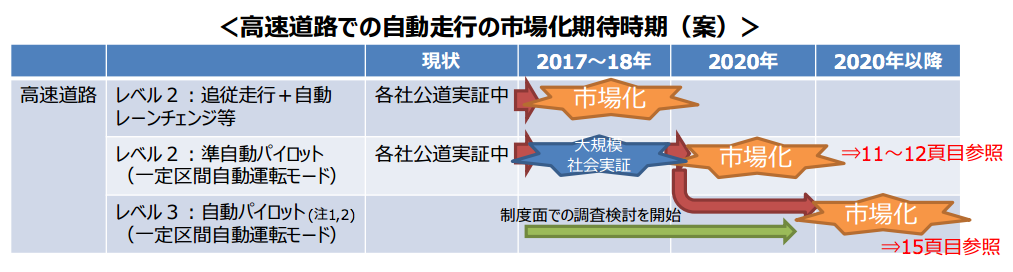
高速道路での自動走行車のロードマップでは、
2020年以降を見据えた、高速道路等での自動走行システムの発展としては、以下のようなスケジュールを見込む。
2020年までに、準自動パイロットの自動走行車(システム)の市場化を目指す。これに向けて、2017年からSIPにて大規模社会実証に取り組む。
さらに、当面2020年以降を想定し、自動走行モード中はシステム責任とする自動パイロット(セカンドタスクが可能)の市販化に向けた、制度面等の調査・検討を開始。
とし、レベル2の追従走行と自動レーンチェンジの市場化は2017年~2018年、レベル2の準自動パイロットのし上かは2020年、レベル3の自動パイロッドの市場化は2020年以降としています。
出所:IT総合戦略本部 第12回道路交通分科会 2016.2
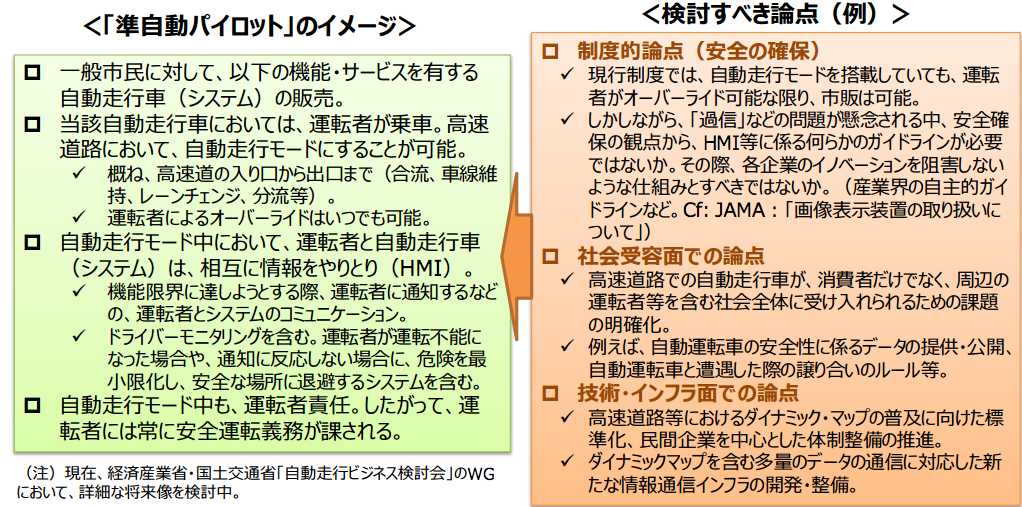
高速道路での自動走行車のイメージと検討すべき論点としては、
2020年までに市場化を目指す自動走行システム(準自動パイロット)のイメージは、下記の通りであり、当面、運転者責任の下で行われることを想定。 その市場化に向けて、社会受容性の確保に加えて、特にHMI(いわゆる「過信」問題を含む)について、今後の対応方針を検討する必要があるのではないか。
とし、以下のように、準自動パイロットイメージと検討すべき論点(例)をあげています。
出所:IT総合戦略本部 第12回道路交通分科会 2016.2
SpecialPR